G5U-PH/S5U-PH�֙C�������x�Ϻ�Ǭ��W�Ƽ�����˾
һ���x��Ҏ��
G5U-PH�������x��G10U-PH�ĸ߷ֱ��������棬��3D����ȫ�����z��יz�y�����ƣ����ԝM�������^��ǰPVֵ�Ĝy����
�x��Ҏ����
Ӳ�����֣�
| �aƷ��̖ | G5U-PH |
| �aƷ���Q | 5mm����ʽ�������x |
| �yԇ�ڏ� | Φ5mm |
| �o�����ʿڏ� | Φ30mm |
| �˜��R���ξ��� | λ/20 |
| ��Դ | �M��He-Ne��������632.8nm) |
| ��·�ГQ | �o���^�죨Φ30mm��ҕ�����c�yԇ��Φ5mmСҕ����ģʽ늿��ГQ |
| �Դ | AC220V50HZ |
ܛ�����֣�
| ܛ�����Q | �����㷨�����QPH�� |
| �����Ŀ | �^��ǰPVֵ��ƽ�ж�Tiltֵ�� |
| �yԇ�؏��� | PV��0.01λ RMS:0.003λ |
| �yԇ���S�`�� | PV<1λ�r PV��0.05λ Tilt��0.2fr������{����1���l�y�� 1λ<PV<2λ�r PV��0.1λ Tilt��0.5fr������{����1���l�y�� 2λ<PV<3λ�r PV��0.2λ Tilt��1fr������{����1���l�y�� |
| �yԇ�r�g | 1.5~2�� |
| �aƷ��̖ | S5U-PH |
| �aƷ���Q | 5mm����ʽ�������x |
| �yԇ�ڏ� | Φ5mm |
| �o�����ʿڏ� | Φ30mm |
| �˜��R���ξ��� | λ/20 |
| ��Դ | �M�ڰ댧�w��������635nm) |
| ��·�ГQ | �o���^�죨Φ30mm��ҕ�����c�yԇ��Φ5mmСҕ����ģʽ늿��ГQ |
| �Դ | AC220V50HZ |
| ܛ�����Q | �����㷨�����QPH�� |
| �����Ŀ | �^��ǰPVֵ��ƽ�ж�Tiltֵ�� |
| �yԇ�؏��� | PV��0.01λ RMS:0.003λ |
| �yԇ���S�`�� | PV<1λ�r PV��0.05λ Tilt��0.2fr������{����1���l�y�� 1λ<PV<2λ�r PV��0.1λ Tilt��0.5fr������{����1���l�y�� |
| �yԇ�r�g | 1.5~2�� |

AK-40�S�rֱ�N�������x����yʽ����x���߾��ȼ������x�����|�������xAK-40
| ���÷�ʽ | |
| ��ʽ���Pʽ���� ƽ�濂�ɣ����濂�� �o�B�y������λ���{�Ɯy�� | |
| ���� | |
| �˜�ƽ������慢���R �cZYGOTM�����R���� �˜�˥�R ����x֧��/�{�������_�� ˮƽ���S�{���� | |
| IntelliWave TM���� | |
| Windows XPϵ�y ����l�y�o�B�c��λ���{�Ʒ��� �����ķ������ߣ������yӋ�Y�ϡ���� �@�������Ӱ��ӹ����Լ���Ӱ���D�Q ����D�D�Q�ɹ�W��OPD�������؈D��surface map�� �Ԅӷ��͜y�����Ԅӻ��������� ��B��Lab VIEW ��Research Systems IDL ��Math Work��Matlab��Microsoft Excelܛ�� 1 ���ֵ��PV ��Peak-to-Valley�� ��ȡ���L���ϣ��y���߶�����c�c����c�g�ľ��x 2 ������ֵ��RMS��Root-Mean-Square����ȡ���L���ϣ����x�߶����ľ��ľ�����ƫ��ֵ�� 3 ��ƽ��z������3-Flat Test ����ʹ������ƽ�慢���R��z�y�Ĝy����ʽ�� 4 �؏��ԣ�Repeatability���Ķ��x������ͬ�ĽM���M��100�����y����ÿ�M����������20������ƽ����ȡ�ã�100�M�y�����yӋ���������x�؏��Լ���һ���˜ʲ�ֵ�� | |
| ��̖ | AK-40 Fizeau type |
| �����Դ | |
| ���L/ ���� | He-Ne ,632.8nm , 0.7mw |
| �y������ֱ�� | 15Ӣ�磨38mm�� |
| ƫ���� | �Aƫ��ӣ�Circular Polarization�� |
| ����L�� | ��100���� |
| ���Ʒ�ʽ | |
| �^���{�� | 4On/off �_�P |
| ׃�� | ���D�ȱP |
| �����{�� | ���D�o |
| �⏊�{�� | ���D�o |
| ģʽ�ГQ | �ք��ГQ |
| �� �W �� �� | |
| ׃������ | 1X—6X |
| �����{�� | ���c�{�� |
| �^���{���� | ±1.8�� |
| �A��r�g | �� 30��� |
| ҕ�lҎ�� | |
| �z��C | RS170�� 640X480���� |
| �@ʾ�� | Ӌ��C��LCD��Ļ��ҕ�l�Oҕ�� |
| 늚ⲿ�� | |
| � Դ | 110/240 Volts ,50/60Hz ��50 watts�� |
| �C��� | |
| �ߴ� | 120*120*250mm |
| ���� | 6 kg |
| �y�����ܣ����� IntelliWAare TMܛ�����Y���� | |
| ϵ�y�ʴ_�ȣ���ƽ��z��������3�� | λ/100 , ���ֵ��1�� |
| ���ֵ�؏��ԣ�4����PV Repeatability�� | λ/3 00 , ���ֵ��1�� |
| ����ֵ�؏����ܣ�2����4����RMS Repeatability�� | λ/2,000 |
| ����l�y����ȣ�Fringe Resolution �� | 180�l |
����B�������x
SJ6000�������x
SJ6000���ø߷��l���ʼ������������p�vģ�᷀�l���g���߾��ȭh���a��ģ�K�� �΅��������·�OӋ���߾��ȼ��������̖̎��ϵ�y��������Ӌ��C����ϵ�y���g�����F���N�����ĸ߾��Ȝy����ͨ�^����᷀�l���Ƽ��g�����F����(5~10 ���)���߾���(0.05ppm)�����ɔ_���������L�ڷ����Ժõļ����l��ݔ�������ò�ͬ�Ĺ�W�R�M�c������ϣ��õ���ͬ�ĸ�����̖��Ȼ��ͨ�^�߾��ȼ��� ������̖̎��ϵ�y�õ����攵����������ͨ�^Ӌ��C�M���@ʾ�̈́ӑB������
ʹ�Õr���������Ȱ����OӋ�Ďι�·���b����ϵ��R�M���ι�·�����~�ˠ��d�ͼ������xԭ�����A�OӋ�ģ��D���~�ˠ��d����x�Ļ���ԭ��D��

�~�ˠ��d����x��ԭ����һ�������֞��������Ա�������ƽ���R��������@������Ķ��� ��l�����档�����Ѓ�����IJ�ͬ��̿���ͨ�^�{��������L���Լ���׃���|�������ʁ팍�F���Ķ��γɲ�ͬ�ĸ���D�ӡ�����l�y�ǵȹ�̲��c��܉�E����ˣ�Ҫ ����ij�N����a���ĈD�ӣ��������ɹ�Ĺ�̲�λ�÷ֲ�������
��Îι�·���ڙz��ܛ�����O���y�����_ʼ���Y��λ�ã��c��“�_ʼ”���o��ܛ����������r�@ʾ�y�����ÄӑB����������Y�������߿�ͨ�^���y������ ���������M�з������õ����L�ȡ��Ƕȡ�ֱ���ȡ���ֱ�ȡ�ƽ��ȵȅ�����������ϵ�y���õęz�y�˜ʌ����y���ĸ�헅����M�кϸ��ж����z�y�Y�����Ԅ����əz�� �Y����
�������c�����������g����| 1 | ���Ԝy�L���x | 40m |
| 2 | ���Ԝy�L���� | ±��0.02+0.5L��um |
| 3 | ���ⷀ�l���� | 0.05ppm |
| 4 | �ֱ��� | 0.001um |
| 5 | *��y���ٶ� | 4.0m/S |
| 6 | �ӑB�ɼ��l�� | 50KHZ |
| 7 | �A��r�g | 5~10��� |
| 8 | �h���a������ | �՚≺����±1.0mBar�� �՚��ȣ�±6%�� ���Ϝضȣ�±0.1�� |
| 9 | ��������(�����_�ܣ����b) | 15Kg |
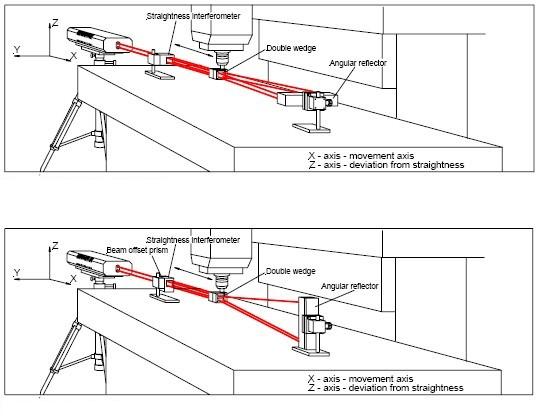 ���Ϟ�ֱ���Ȝy��ʾ��D������ˮƽ����ֱ���Ⱥʹ�ֱ����ֱ����
���Ϟ�ֱ���Ȝy��ʾ��D������ˮƽ����ֱ���Ⱥʹ�ֱ����ֱ����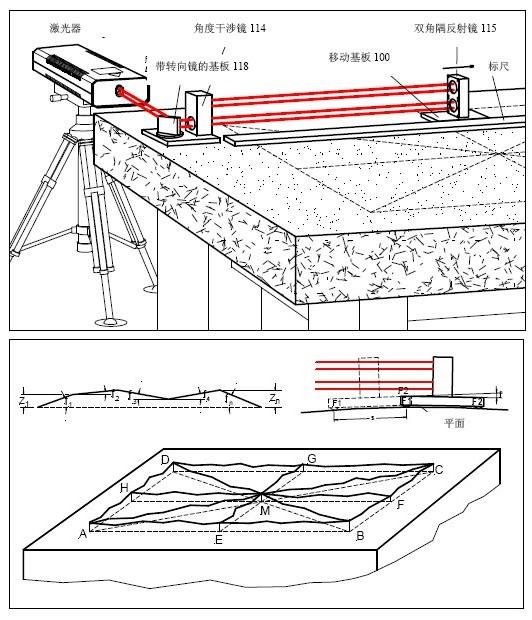 ������ƽ��Ȝy��ʾ��D
������ƽ��Ȝy��ʾ��D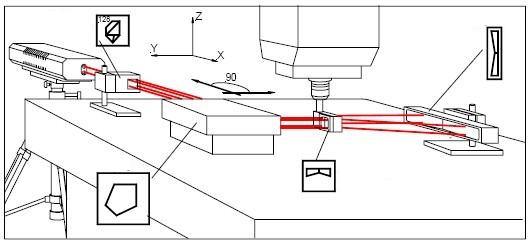 �����Ǵ�ֱ�Ȝy��ʾ��D
�����Ǵ�ֱ�Ȝy��ʾ��D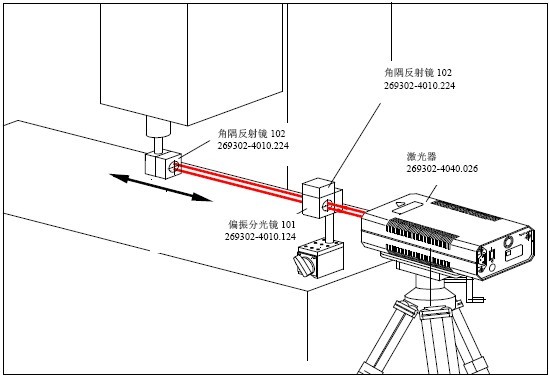 ������λ�ơ����Զȡ��ٶȡ����ٶȡ���λ���Ȝy��ʾ��D
������λ�ơ����Զȡ��ٶȡ����ٶȡ���λ���Ȝy��ʾ��D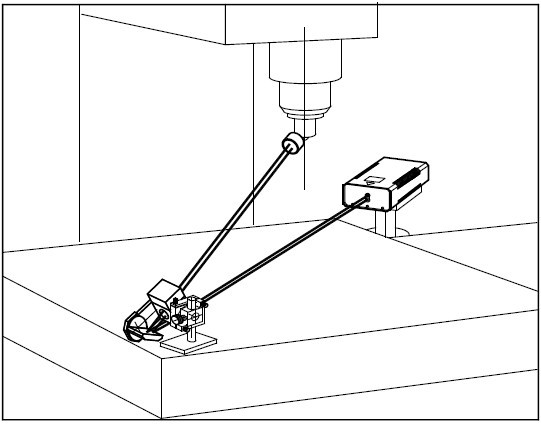 �����nj��ǜy��ʾ��D
�����nj��ǜy��ʾ��D �����Ǹ����ǜy��ʾ��D
�����Ǹ����ǜy��ʾ��D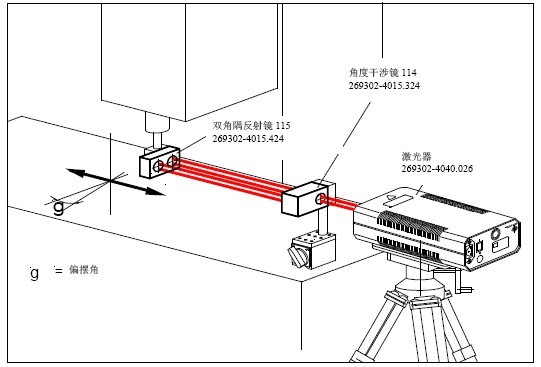 ������ƫ�[�ǜy��ʾ��D
������ƫ�[�ǜy��ʾ��D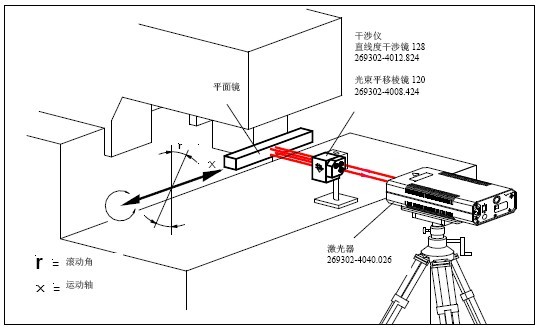 �����ǝL�ӽǜy��ʾ��D
�����ǝL�ӽǜy��ʾ��D �����ǻ��D�_��λ���Ȝy��ʾ��D
�����ǻ��D�_��λ���Ȝy��ʾ��D Ү�à��p�l�������x�ӱ������ģ�.pdf
Ү�à��p�l�������x�ӱ������ģ�.pdf